viernes, 18 de diciembre de 2015
Hago presente mi cuarta entrega de mi prototipo, bueno empecemos por los materiales que se utilizó:
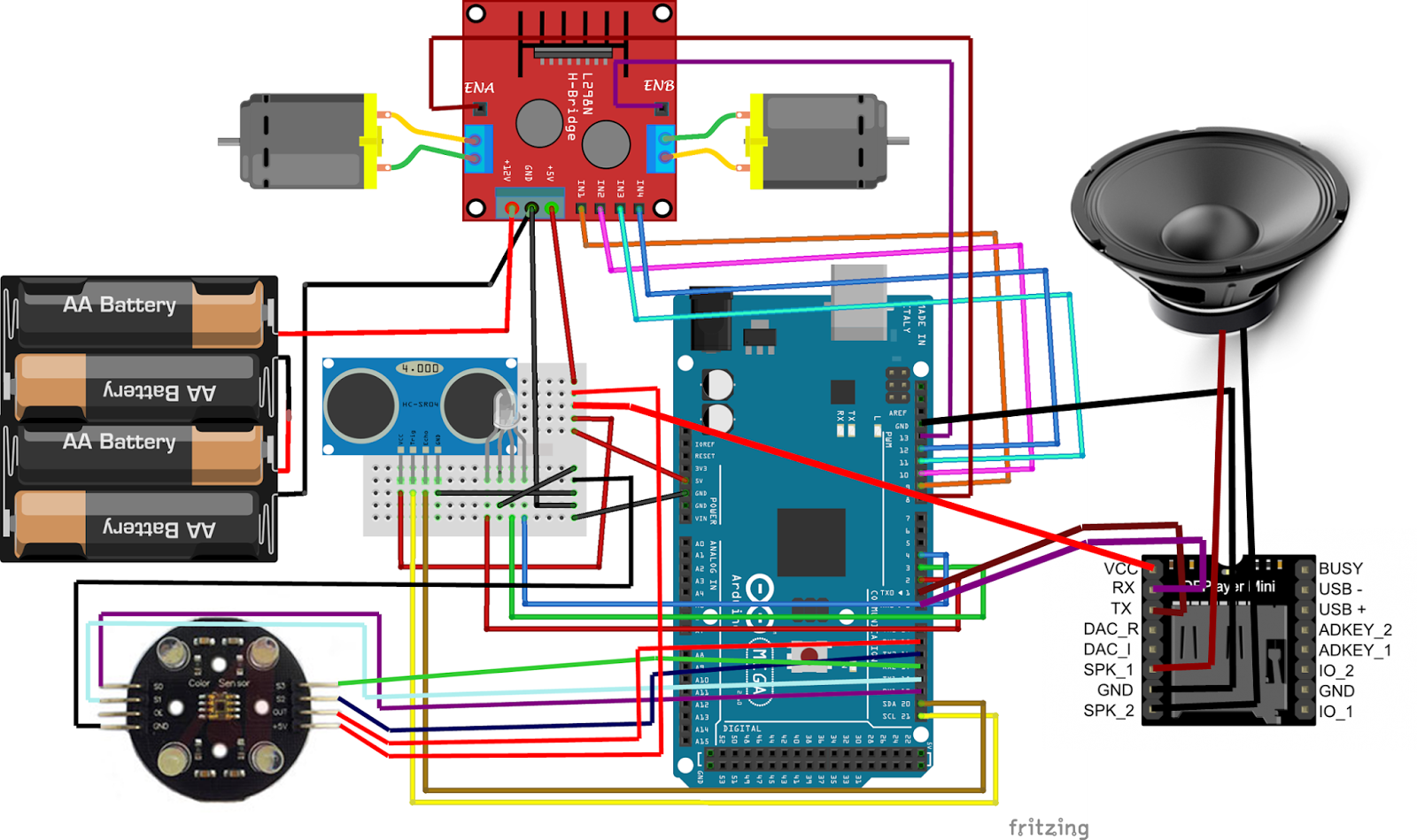
-Arduino mega: Placa fundamental y principal para dar el funcionamiento al circuito.

-Placa L298N: Es el controlador principal para hacer funcionar los motores DC.

-Kit de motores DC: Un kit de motores de corriente alterna, con su base diseñada.

-Sensor ultrasónico: Sensor que nos permite captar una determinada distancia para que el prototipo esquive el obstáculo.

-Sensor TSC3200 o detector de color: Detecta la cantidad de rojo, verde y azul de un objeto.

-Fuente de alimentación de 9V: Energía necesaria para que funcione la placa L298N y para alimentar el arduino.


-Modulo DF Player mini: Módulo reproductor de archivos mp3 o wav.

-Speaker o parlante: Nos sirve para dar la salida del audio del módulo mp3.

-Cables.- Para las conexiones de los pines de los componentes.

--Led RGB con tres resistencias para cada color: Permitirá encender el color rojo, verde o azul, según detecte el sensor TSC3200, cada pin con su respectiva resistencia de 220 o 330 Ohmios.

Diagrama de conexión de los componentes:
Código empleado:
//Librerías necesarias para el funcionamiento del módulo mp3
#include <SoftwareSerial.h>
#include <DFPlayer_Mini_Mp3.h>
//Variables de los pines del sensor de distancia
int trigger = 21;
int echo = 20;
//Motor Izquierdo
int ENA = 8;
int IN1 = 9;
int IN2 = 10;
//Motor Derecho
int ENB = 13;
int IN3 = 11;
int IN4 = 12;
int estado = 0;
int cont = 0;
int direccion;
int giros;
if (direccion == 0) {
retroDerecha();}
digitalWrite(IN1, LOW);
digitalWrite(IN2, HIGH);
analogWrite(ENA, 255);
digitalWrite(IN3, LOW);
digitalWrite(IN4, HIGH);
analogWrite(ENB, 255);
delay(300);
digitalWrite(IN1, HIGH);
digitalWrite(IN2, LOW);
analogWrite(ENA, 255);
digitalWrite(IN3, HIGH);
digitalWrite(IN4, LOW);
analogWrite(ENB, 255);
delay(300);
cont++;
Serial.println(cont);
if (cont == 10){
apagarTodo();}}
//Método apagar
void apagar() {
analogWrite(ENA, 0);
analogWrite(ENB, 0);
delay(100);}
//Método apagarTodo
void apagarTodo() {
cont=0;
analogWrite(ENA, 0);
analogWrite(ENB, 0);
//Condición para detectar color verde
else if (green < red && green < blue) {
digitalWrite(redLed, LOW);
digitalWrite(greenLed, HIGH); //Encendemos led verde si la condición se cumple
delay(3000);
digitalWrite(blueLed, LOW);
Serial.println("Se ha detectado el color verde");
sensorColor = 1;
colores=2;}
//Condición para detectar color azul
else if (blue > red && blue > green) {
digitalWrite(redLed, LOW);
digitalWrite(greenLed, LOW);
digitalWrite(blueLed, HIGH); //Encendemos led azul si la condición se cumple
delay(3000);
Serial.println("Se ha detectado el color azul");
colores=3;
sensorColor = 1;}
//Apagamos todos los leds
digitalWrite(redLed, LOW);
digitalWrite(greenLed, LOW);
digitalWrite(blueLed, LOW);}
/*Si la variable colores que almacena el color que pone el usuario en el sensor es igual a la variable sonido que es el color que pidió el robot entonces*/
if (colores==sonido){
#include <DFPlayer_Mini_Mp3.h>
//Variables de los pines del sensor de distancia
int trigger = 21;
int echo = 20;
//Motor Izquierdo
int ENA = 8;
int IN1 = 9;
int IN2 = 10;
//Motor Derecho
int ENB = 13;
int IN3 = 11;
int IN4 = 12;
int estado = 0;
int cont = 0;
int direccion;
int giros;
int sonido=0;
int colores=0;
//Variables del sensor de color
const int s0 = 19;
const int s1 = 18;
const int s2 = 16;
const int s3 = 17;
const int out = 15;
// Variables de los leds rojo verde y azul
int redLed = 2;
int greenLed =3;
int blueLed = 4;
// Variables que almacenan la cantidad de color rojo, verde y azul
int red = 0;
int green = 0;
int blue = 0;
void setup() {
Serial.begin(9600);
int colores=0;
//Variables del sensor de color
const int s0 = 19;
const int s1 = 18;
const int s2 = 16;
const int s3 = 17;
const int out = 15;
// Variables de los leds rojo verde y azul
int redLed = 2;
int greenLed =3;
int blueLed = 4;
// Variables que almacenan la cantidad de color rojo, verde y azul
int red = 0;
int green = 0;
int blue = 0;
void setup() {
Serial.begin(9600);
//Iniciamos el funcionamiento del módulo mp3 con volumen de sonido: 50
mp3_set_serial (Serial);
delay(1);
mp3_set_volume (50);
mp3_set_serial (Serial);
delay(1);
mp3_set_volume (50);
//Configuración de pines del sensor de distancia
pinMode(trigger, OUTPUT);
pinMode(echo, INPUT);
pinMode(trigger, OUTPUT);
pinMode(echo, INPUT);
//Configuración de los pines del controlador de motores L298N
pinMode(ENA, OUTPUT);
pinMode(ENB, OUTPUT);
pinMode(IN1, OUTPUT);
pinMode(IN2, OUTPUT);
pinMode(IN3, OUTPUT);
pinMode(IN4, OUTPUT);
pinMode(ENA, OUTPUT);
pinMode(ENB, OUTPUT);
pinMode(IN1, OUTPUT);
pinMode(IN2, OUTPUT);
pinMode(IN3, OUTPUT);
pinMode(IN4, OUTPUT);
//Iniciamos el random
randomSeed(analogRead(0));
//Llamamos método apagar, que apaga los motores durante 2 segundos para despues iniciar
apagar();
delay(2000);
//Configuración de pines del sensor de color
pinMode(s0, OUTPUT);
pinMode(s1, OUTPUT);
pinMode(s2, OUTPUT);
pinMode(s3, OUTPUT);
pinMode(out, INPUT);
apagar();
delay(2000);
//Configuración de pines del sensor de color
pinMode(s0, OUTPUT);
pinMode(s1, OUTPUT);
pinMode(s2, OUTPUT);
pinMode(s3, OUTPUT);
pinMode(out, INPUT);
//Configuración del led RGB
pinMode(redLed, OUTPUT);
pinMode(greenLed, OUTPUT);
pinMode(blueLed, OUTPUT);
pinMode(redLed, OUTPUT);
pinMode(greenLed, OUTPUT);
pinMode(blueLed, OUTPUT);
//Encendemos el pin s0 y s1 del sensor de color
digitalWrite(s0, HIGH);
digitalWrite(s1, HIGH);
digitalWrite(s0, HIGH);
digitalWrite(s1, HIGH);
//Iniciamos con una canción de fondo del prototipo
mp3_play(8);}
void loop() {
digitalWrite(trigger, LOW);
delayMicroseconds(5);
// Comienzo de la medida
digitalWrite(trigger, HIGH);
delayMicroseconds(10);
digitalWrite(trigger, LOW);
// Adquisición y conversión a centímetros
float distancia = pulseIn(echo, HIGH);
distancia = distancia * 0.01657;
if ((distancia >= 15) && (distancia <= 40)) {
estado = 0;}
else if (distancia > 10.0) {
estado = 1;}
digitalWrite(trigger, LOW);
delayMicroseconds(5);
// Comienzo de la medida
digitalWrite(trigger, HIGH);
delayMicroseconds(10);
digitalWrite(trigger, LOW);
// Adquisición y conversión a centímetros
float distancia = pulseIn(echo, HIGH);
distancia = distancia * 0.01657;
if ((distancia >= 15) && (distancia <= 40)) {
estado = 0;}
else if (distancia > 10.0) {
estado = 1;}
else {
estado = 2;}
switch (estado) {
estado = 2;}
switch (estado) {
//Conforme a la condición de arriba, si el estado es 0 el robot disminuye un poco su velocidad
case 0:
digitalWrite(IN1, LOW);
digitalWrite(IN2, HIGH);
analogWrite(ENA, 200);
digitalWrite(IN3, HIGH);
digitalWrite(IN4, LOW);
analogWrite(ENB, 200);
break;
case 0:
digitalWrite(IN1, LOW);
digitalWrite(IN2, HIGH);
analogWrite(ENA, 200);
digitalWrite(IN3, HIGH);
digitalWrite(IN4, LOW);
analogWrite(ENB, 200);
break;
//Si el estado es 1: el robot avanza normalmente su trayecto
case 1:
avanzarA();
avanzarB();
break;
avanzarA();
avanzarB();
break;
/*Si el estado es 2: El robot pasa a esquivar el obstáculo y a través del random elije si girar a la
izquierda o derecha*/
case 2:
direccion = random(2);
direccion = random(2);
if (direccion == 0) {
retroDerecha();}
else {
retroIzquierda();}
break;}}
//Método: Avanza el motor A(izquierdo) a velocidad normal
void avanzarA() {
digitalWrite(IN1, LOW);
digitalWrite(IN2, HIGH);
analogWrite(ENA, 255);}
//Método: Avanza el motor B(derecho) a velocidad normal
void avanzarB() {
digitalWrite(IN3, HIGH);
digitalWrite(IN4, LOW);
analogWrite(ENB, 255);}
//Método para girar a la derecha
void retroDerecha() {
digitalWrite(IN1,HIGH);
digitalWrite(IN2,LOW);
analogWrite(ENA,255);
digitalWrite(IN3,LOW);
digitalWrite(IN4,HIGH);
analogWrite(ENB,255);
delay(150);
retroIzquierda();}
break;}}
//Método: Avanza el motor A(izquierdo) a velocidad normal
void avanzarA() {
digitalWrite(IN1, LOW);
digitalWrite(IN2, HIGH);
analogWrite(ENA, 255);}
//Método: Avanza el motor B(derecho) a velocidad normal
void avanzarB() {
digitalWrite(IN3, HIGH);
digitalWrite(IN4, LOW);
analogWrite(ENB, 255);}
//Método para girar a la derecha
void retroDerecha() {
digitalWrite(IN1,HIGH);
digitalWrite(IN2,LOW);
analogWrite(ENA,255);
digitalWrite(IN3,LOW);
digitalWrite(IN4,HIGH);
analogWrite(ENB,255);
delay(150);
digitalWrite(IN1, LOW);
digitalWrite(IN2, HIGH);
analogWrite(ENA, 255);
digitalWrite(IN3, LOW);
digitalWrite(IN4, HIGH);
analogWrite(ENB, 255);
delay(300);
//Variable que nos permite contar 10 esquivos del robot
cont++;
Serial.println(cont);
/*Si el contador llega a 10 llama al método apagarTodo donde apaga los motores y da paso al funcionamiento del sensor de color*/
if (cont == 10){
apagarTodo();}}
//Método que gira a la izquierda
void retroIzquierda(){
digitalWrite(IN1,HIGH);
digitalWrite(IN2,LOW);
analogWrite(ENA,255);
digitalWrite(IN3,LOW);
digitalWrite(IN4,HIGH);
analogWrite(ENB,255);
delay(150);
cont++;
Serial.println(cont);
/*Si el contador llega a 10 llama al método apagarTodo donde apaga los motores y da paso al funcionamiento del sensor de color*/
if (cont == 10){
apagarTodo();}}
//Método que gira a la izquierda
void retroIzquierda(){
digitalWrite(IN1,HIGH);
digitalWrite(IN2,LOW);
analogWrite(ENA,255);
digitalWrite(IN3,LOW);
digitalWrite(IN4,HIGH);
analogWrite(ENB,255);
delay(150);
digitalWrite(IN1, HIGH);
digitalWrite(IN2, LOW);
analogWrite(ENA, 255);
digitalWrite(IN3, HIGH);
digitalWrite(IN4, LOW);
analogWrite(ENB, 255);
delay(300);
cont++;
Serial.println(cont);
if (cont == 10){
apagarTodo();}}
//Método apagar
void apagar() {
analogWrite(ENA, 0);
analogWrite(ENB, 0);
delay(100);}
//Método apagarTodo
void apagarTodo() {
cont=0;
analogWrite(ENA, 0);
analogWrite(ENB, 0);
/*Reproducción de sonidos donde pide que coloquemos el color que diga el robot a través del random el elije que color pedir*/
mp3_play(0);
delay(2000);
sonido=random(1,4);
mp3_play (sonido);
delay(2000);
delay(2000);
sonido=random(1,4);
mp3_play (sonido);
delay(2000);
//Ejecuta el sensor de color y empieza con la lectura
int sensorColor = 0;
while (sensorColor != 1) {
color();
Serial.print("R Intensity:");
Serial.print(red, DEC);
Serial.print(" G Intensity: ");
Serial.print(green, DEC);
Serial.print(" B Intensity : ");
Serial.print(blue, DEC);
Serial.println();
delay(100);
int sensorColor = 0;
while (sensorColor != 1) {
color();
Serial.print("R Intensity:");
Serial.print(red, DEC);
Serial.print(" G Intensity: ");
Serial.print(green, DEC);
Serial.print(" B Intensity : ");
Serial.print(blue, DEC);
Serial.println();
delay(100);
//Condición para detectar color rojo
if (red < blue && green > red && red < 20) {
digitalWrite(redLed, HIGH); //Encendemos led rojo si la condición se cumple
delay(3000);
digitalWrite(greenLed, LOW);
digitalWrite(blueLed, LOW);
Serial.println("Se ha detectado el color rojo");
sensorColor = 1;
colores=1;}
if (red < blue && green > red && red < 20) {
digitalWrite(redLed, HIGH); //Encendemos led rojo si la condición se cumple
delay(3000);
digitalWrite(greenLed, LOW);
digitalWrite(blueLed, LOW);
Serial.println("Se ha detectado el color rojo");
sensorColor = 1;
colores=1;}
//Condición para detectar color verde
else if (green < red && green < blue) {
digitalWrite(redLed, LOW);
digitalWrite(greenLed, HIGH); //Encendemos led verde si la condición se cumple
delay(3000);
digitalWrite(blueLed, LOW);
Serial.println("Se ha detectado el color verde");
sensorColor = 1;
colores=2;}
//Condición para detectar color azul
else if (blue > red && blue > green) {
digitalWrite(redLed, LOW);
digitalWrite(greenLed, LOW);
digitalWrite(blueLed, HIGH); //Encendemos led azul si la condición se cumple
delay(3000);
Serial.println("Se ha detectado el color azul");
colores=3;
sensorColor = 1;}
//Apagamos todos los leds
digitalWrite(redLed, LOW);
digitalWrite(greenLed, LOW);
digitalWrite(blueLed, LOW);}
/*Si la variable colores que almacena el color que pone el usuario en el sensor es igual a la variable sonido que es el color que pidió el robot entonces*/
if (colores==sonido){
//Se ejecutan sonidos de exitoso dando a saber que ingreso bien el color pedido por el robot
mp3_play(7);
delay(4000);
mp3_play (4);
delay (3000);
mp3_play(8);}
mp3_play(7);
delay(4000);
mp3_play (4);
delay (3000);
mp3_play(8);}
//Caso contrario si no acierta el color manda un sonido erroneo
else{
mp3_play (6);
delay (3500);
mp3_play (5);
delay (3000);
mp3_play(8);}}
//Método para detectar la cantidad de cada color: rojo, verde y azul
void color() {
digitalWrite(s2, LOW);
digitalWrite(s3, LOW);
//Capta el color rojo
red = pulseIn(out, digitalRead(out) == HIGH ? LOW : HIGH)
digitalWrite(s3, HIGH);
//Capta el color azul
blue = pulseIn(out, digitalRead(out) == HIGH ? LOW : HIGH);
digitalWrite(s2, HIGH);
//Capta el color verde
green = pulseIn(out, digitalRead(out) == HIGH ? LOW : HIGH);}
Imágenes prototipo:






Video del funcionamiento:
Podcast:
else{
mp3_play (6);
delay (3500);
mp3_play (5);
delay (3000);
mp3_play(8);}}
//Método para detectar la cantidad de cada color: rojo, verde y azul
void color() {
digitalWrite(s2, LOW);
digitalWrite(s3, LOW);
//Capta el color rojo
red = pulseIn(out, digitalRead(out) == HIGH ? LOW : HIGH)
digitalWrite(s3, HIGH);
//Capta el color azul
blue = pulseIn(out, digitalRead(out) == HIGH ? LOW : HIGH);
digitalWrite(s2, HIGH);
//Capta el color verde
green = pulseIn(out, digitalRead(out) == HIGH ? LOW : HIGH);}






Video del funcionamiento:
Podcast:
Suscribirse a:
Enviar comentarios
(Atom)
Entradas populares
-
 Hago presente mi segunda entrega de mi prototipo, empezando con los materiales que utilicé: -Arduino UNO.- Placa principal para dar func...
Hago presente mi segunda entrega de mi prototipo, empezando con los materiales que utilicé: -Arduino UNO.- Placa principal para dar func... -
 Esta vez les traigo un ejercicio de enrutamiento estático con 3 routers: Datos: Lan1: 172.168.0.0 /18 Lan2: 172.168.64.0 /18 Lan3...
Esta vez les traigo un ejercicio de enrutamiento estático con 3 routers: Datos: Lan1: 172.168.0.0 /18 Lan2: 172.168.64.0 /18 Lan3... -
 A continuación mostrare el funcionamiento del sensor detector de colores TCS3200 con el arduino. Como habíamos dicho en la presentación d...
A continuación mostrare el funcionamiento del sensor detector de colores TCS3200 con el arduino. Como habíamos dicho en la presentación d... -
 Hago presente mi cuarta entrega de mi prototipo, bueno empecemos por los materiales que se utilizó: -Arduino mega: Placa fundamental y p...
Hago presente mi cuarta entrega de mi prototipo, bueno empecemos por los materiales que se utilizó: -Arduino mega: Placa fundamental y p... -
 Hola estimados esta vez les traigo un tutorial de como instalar Packettracer 6.2 para el sistema operativo ubuntu, bueno sin mas rodeo v...
Hola estimados esta vez les traigo un tutorial de como instalar Packettracer 6.2 para el sistema operativo ubuntu, bueno sin mas rodeo v...
Muy bien Dennis, siga adelante
ResponderEliminar